Off-Policy Actor-Critic Methods
The policy gradient methods that we have studied so far, including REINFORCE, QAC, and \(\mathrm{A} 2 \mathrm{C}\), are all on-policy. The reason for this can be seen from the expression of the true gradient: \[ \nabla_\theta J(\theta)=\mathbb{E}_{S \sim \eta, A \sim \pi}\left[\nabla_\theta \ln \pi\left(A \mid S, \theta_t\right)\left(q_\pi(S, A)-v_\pi(S)\right)\right] . \]
To use samples to approximate this true gradient, we must generate the action samples by following \(\pi(\theta)\). Hence, \(\pi(\theta)\) is the behavior policy. Since \(\pi(\theta)\) is also the target policy that we aim to improve, the policy gradient methods are on-policy.
In the case that we already have some samples generated by a given behavior policy, the policy gradient methods can still be applied to utilize these samples. To do that, we can employ a technique called importance sampling. It is a general technique for estimating expected values defined over one probability distribution using some samples drawn from another distribution.
Sources:
Importance sampling
We next introduce the importance sampling technique. Consider a random variable \(X \in \mathcal{X}\). Suppose that \(p_0(X)\) is a probability distribution. Our goal is to estimate \(\mathbb{E}_{X \sim p_0}[X]\). Suppose that we have some i.i.d. samples \(\left\{x_i\right\}_{i=1}^n\).
Suppose the samples \(\left\{x_i\right\}_{i=1}^n\) are not generated by \(p_0\). Instead, they are generated by another distribution \(p_1\). Can we still use these samples to approximate \(\mathbb{E}_{X \sim p_0}[X]\) ? The answer is yes. \(\mathbb{E}_{X \sim p_0}[X]\) can be approximated based on the importance sampling technique.
In particular, \(\mathbb{E}_{X \sim p_0}[X]\) satisfies \[ \mathbb{E}_{X \sim p_0}[X]=\sum_{x \in \mathcal{X}} p_0(x) x=\sum_{x \in \mathcal{X}} p_1(x) \underbrace{\frac{p_0(x)}{p_1(x)} x}_{f(x)}= \color{teal}{\mathbb{E}_{X \sim p_1}[f(X)]} . \]
Thus, estimating \(\mathbb{E}_{X \sim p_0}[X]\) becomes the problem of estimating \(\mathbb{E}_{X \sim p_1}[f(X)]\). Let \[ \bar{f} \doteq \frac{1}{n} \sum_{i=1}^n f\left(x_i\right) \]
Since \(\bar{f}\) can effectively approximate \(\mathbb{E}_{X \sim p_1}[f(X)]\), we obtain \[ \mathbb{E}_{X \sim p_0}[X]=\color{teal}{\mathbb{E}_{X \sim p_1}[f(X)]} \approx \bar{f}=\frac{1}{n} \sum_{i=1}^n f\left(x_i\right)=\frac{1}{n} \sum_{i=1}^n \underbrace{\frac{p_0\left(x_i\right)}{p_1\left(x_i\right)}}_{\begin{array}{c} \text { importance } \\ \text { weight } \end{array}} x_i . \]
Here, \(\frac{p_0\left(x_i\right)}{p_1\left(x_i\right)}\) is called the importance weight. When \(p_1=p_0\), the importance weight is 1 and \(\bar{f}\) becomes \(\bar{x}\). When \(p_0\left(x_i\right) \geq p_1\left(x_i\right), x_i\) can be sampled more frequently by \(p_0\) but less frequently by \(p_1\). In this case, the importance weight, which is greater than one, emphasizes the importance of this sample.
You may ask that while \(p_0(x)\) is required in \[ \begin{equation} \label{eq10_10} \frac{1}{n} \sum_{i=1}^n \frac{p_0\left(x_i\right)}{p_1\left(x_i\right)} x_i, \end{equation} \] why do we not directly calculate \(\mathbb{E}_{X \sim p_0}[X]\) using its definition \[ \mathbb{E}_{X \sim p_0}[X]=\sum_{x \in \mathcal{X}} p_0(x) x \] ?
The answer is as follows. To use the definition, we need to know either the analytical expression of \(p_0\) or the value of \(p_0(x)\) for every \(x \in \mathcal{X}\). However, it is difficult to obtain the analytical expression of \(p_0\) when the distribution is represented by, for example, a neural network. It is also difficult to obtain the value of \(p_0(x)\) for every \(x \in \mathcal{X}\) when \(\mathcal{X}\) is large. By contrast, \(\eqref{eq10_10}\) merely requires the values of \(p_0\left(x_i\right)\) for some samples and is much easier to implement in practice.
The off-policy policy gradient theorem
Like the previous on-policy case, we need to derive the policy gradient in the off-policy case.
Suppose \(\beta\) is the behavior policy that generates experience samples.
Our aim is to use these samples to update a target policy \(\pi\) that can minimize the metric \[ J(\theta)=\sum_{s \in \mathcal{S}} d_\beta(s) v_\pi(s)=\mathbb{E}_{S \sim d_\beta}\left[v_\pi(S)\right] \] where \(d_\beta\) is the stationary distribution under policy \(\beta\) and \(v_\pi\) is the state value under policy \(\pi\).
The gradient of this metric is given in the following theorem.
Theorem 10.1 (Off-policy policy gradient theorem). In the discounted case where \(\gamma \in\) \((0,1)\), the gradient of \(J(\theta)\) is \[ \nabla_\theta J(\theta)=\mathbb{E}_{S \sim \rho, A \sim \beta}[\underbrace{\frac{\pi(A \mid S, \theta)}{\beta(A \mid S)}}_{\begin{array}{c} \text { importance } \\ \text { weight } \end{array}} \nabla_\theta \ln \pi(A \mid S, \theta) q_\pi(S, A)], \] where the state distribution \(\rho\) is \[ \rho(s) \doteq \sum_{s^{\prime} \in \mathcal{S}} d_\beta\left(s^{\prime}\right) \operatorname{Pr}_\pi\left(s \mid s^{\prime}\right), \quad s \in \mathcal{S}, \] where \[ \operatorname{Pr}_\pi\left(s \mid s^{\prime}\right)=\sum_{k=0}^{\infty} \gamma^k\left[P_\pi^k\right]_{s^{\prime} s}=\left[\left(I-\gamma P_\pi\right)^{-1}\right]_{s^{\prime} s} \] is the discounted total probability of transitioning from \(s^{\prime}\) to \(s\) under policy \(\pi\).
The gradient \(\nabla_\theta J(\theta)\) is similar to that in the on-policy case in Theorem 9.1, but there are two differences. The first difference is the importance weight. The second difference is that \(A \sim \beta\) instead of \(A \sim \pi\). Therefore, we can use the action samples generated by following \(\beta\) to approximate the true gradient. The proof of the theorem is given in the appendix.
The off-policy policy gradient is also invariant to a baseline \(b(s)\). In particular, we have
\[ \nabla_\theta J(\theta)=\mathbb{E}_{S \sim \rho, A \sim \beta}\left[\frac{\pi(A \mid S, \theta)}{\beta(A \mid S)} \nabla_\theta \ln \pi(A \mid S, \theta)\left(q_\pi(S, A)-\color{blue}{b(S)}\right)\right] \] because \[ \mathbb{E}\left[\frac{\pi(A \mid S, \theta)}{\beta(A \mid S)} \nabla_\theta \ln \pi(A \mid S, \theta) b(S)\right]=0 . \]
To reduce the estimation variance, we select the baseline as \(b(S)=v_\pi(S)\) as in A2C and obtain \[ \nabla_\theta J(\theta)=\mathbb{E}\left[\frac{\pi(A \mid S, \theta)}{\beta(A \mid S)} \nabla_\theta \ln \pi(A \mid S, \theta)\left(q_\pi(S, A)-\color{blue}{v_\pi(S)}\right)\right] \]
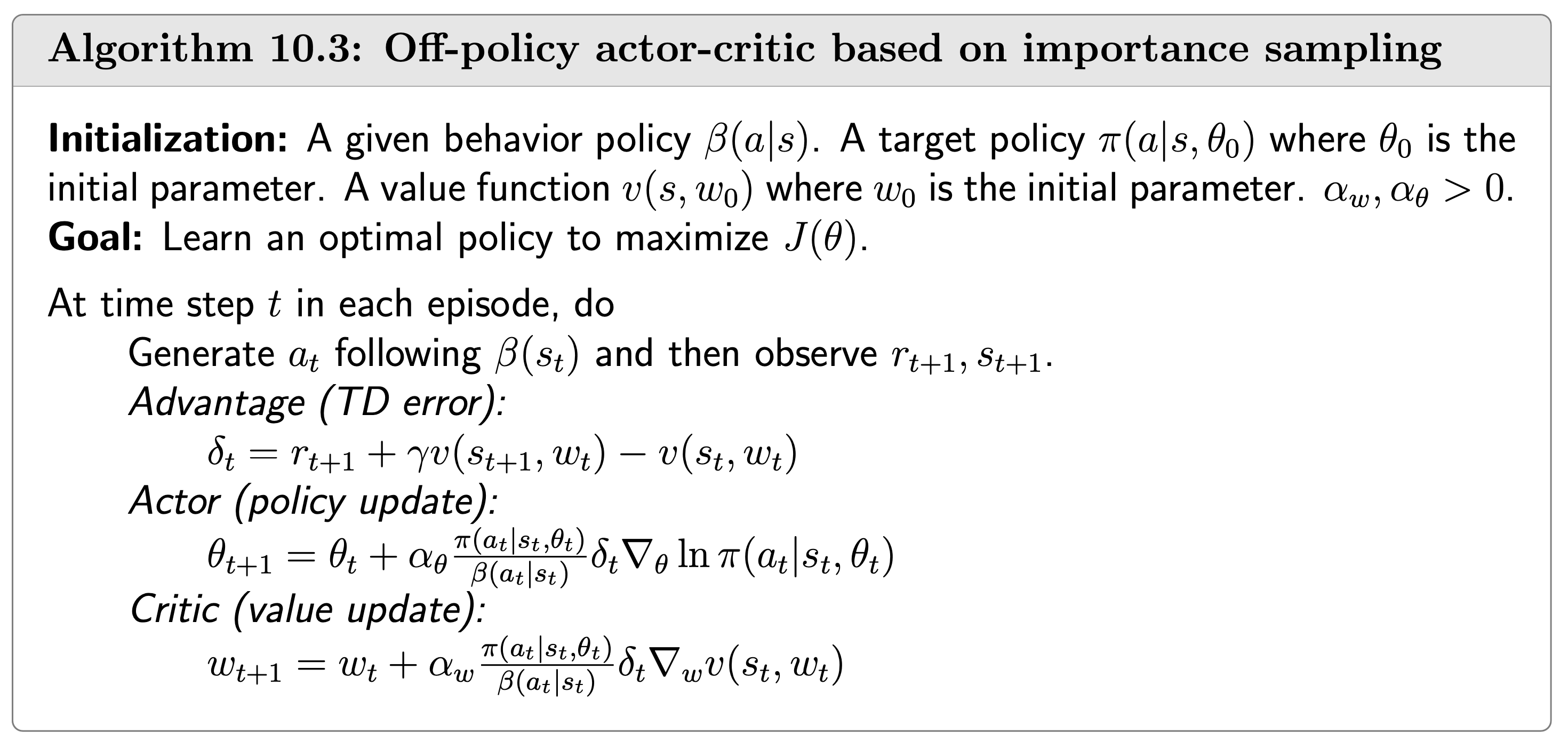
The corresponding stochastic gradient-ascent algorithm is \[ \theta_{t+1}=\theta_t+\alpha_\theta \frac{\pi\left(a_t \mid s_t, \theta_t\right)}{\beta\left(a_t \mid s_t\right)} \nabla_\theta \ln \pi\left(a_t \mid s_t, \theta_t\right)\left(q_t\left(s_t, a_t\right)-v_t\left(s_t\right)\right) \]
Similar to the on-policy case, \[ q_t\left(s_t, a_t\right)-v_t\left(s_t\right) \approx r_{t+1}+\gamma v_t\left(s_{t+1}\right)-v_t\left(s_t\right) \doteq \delta_t\left(s_t, a_t\right) \]
Then, the algorithm becomes \[ \theta_{t+1}=\theta_t+\alpha_\theta \frac{\pi\left(a_t \mid s_t, \theta_t\right)}{\beta\left(a_t \mid s_t\right)} \nabla_\theta \ln \pi\left(a_t \mid s_t, \theta_t\right) \delta_t\left(s_t, a_t\right) \] and hence \[ \theta_{t+1}=\theta_t+\alpha_\theta\left(\frac{\delta_t\left(s_t, a_t\right)}{\beta\left(a_t \mid s_t\right)}\right) \nabla_\theta \pi\left(a_t \mid s_t, \theta_t\right) \]
Appendix
Proof of Theorem 10.1
Since \(d_\beta\) is independent of \(\theta\), the gradient of \(J(\theta)\) satisfies \[ \nabla_\theta J(\theta)=\nabla_\theta \sum_{s \in \mathcal{S}} d_\beta(s) v_\pi(s)=\sum_{s \in \mathcal{S}} d_\beta(s) \nabla_\theta v_\pi(s) . \]
According to Lemma 9.2, the expression of \(\nabla_\theta v_\pi(s)\) is \[ \color{salmon}{\nabla_\theta v_\pi(s)=\sum_{s^{\prime} \in \mathcal{S}} \operatorname{Pr}_\pi\left(s^{\prime} \mid s\right) \sum_{a \in \mathcal{A}} \nabla_\theta \pi\left(a \mid s^{\prime}, \theta\right) q_\pi\left(s^{\prime}, a\right)}, \] where \[ \operatorname{Pr}_\pi\left(s^{\prime} \mid s\right) \doteq \sum_{k=0}^{\infty} \gamma^k\left[P_\pi^k\right]_{s s^{\prime}}=\left[\left(I_n-\gamma P_\pi\right)^{-1}\right]_{s s^{\prime}} \] Substituting \(\color{salmon}{\nabla_\theta v_\pi(s)}\) into \(\sum_{s \in \mathcal{S}} d_\beta(s) \nabla_\theta v_\pi(s)\) yields \[ \begin{aligned} \nabla_\theta J(\theta)=\sum_{s \in \mathcal{S}} d_\beta(s) \nabla_\theta v_\pi(s) & =\sum_{s \in \mathcal{S}} d_\beta(s) \sum_{s^{\prime} \in \mathcal{S}} \operatorname{Pr}_\pi\left(s^{\prime} \mid s\right) \sum_{a \in \mathcal{A}} \nabla_\theta \pi\left(a \mid s^{\prime}, \theta\right) q_\pi\left(s^{\prime}, a\right) \\ & =\sum_{s^{\prime} \in \mathcal{S}}\left(\sum_{s \in \mathcal{S}} d_\beta(s) \operatorname{Pr}_\pi\left(s^{\prime} \mid s\right)\right) \sum_{a \in \mathcal{A}} \nabla_\theta \pi\left(a \mid s^{\prime}, \theta\right) q_\pi\left(s^{\prime}, a\right) \\ & \doteq \sum_{s^{\prime} \in \mathcal{S}} \rho\left(s^{\prime}\right) \sum_{a \in \mathcal{A}} \nabla_\theta \pi\left(a \mid s^{\prime}, \theta\right) q_\pi\left(s^{\prime}, a\right) \\ & =\sum_{s \in \mathcal{S}} \rho(s) \sum_{a \in \mathcal{A}} \nabla_\theta \pi(a \mid s, \theta) q_\pi(s, a) \quad \text { (change } s^{\prime} \text { to } s \text { ) } \\ & =\mathbb{E}_{S \sim \rho}\left[\sum_{a \in \mathcal{A}} \nabla_\theta \pi(a \mid S, \theta) q_\pi(S, a)\right] , \end{aligned} \]
where the 3rd equation is because \[ \rho(s) \doteq \sum_{s^{\prime} \in \mathcal{S}} d_\beta\left(s^{\prime}\right) \operatorname{Pr}_\pi\left(s \mid s^{\prime}\right), \quad s \in \mathcal{S} . \]
By using the importance sampling technique, the above equation can be further rewritten as $$ \[\begin{aligned} \mathbb{E}_{S \sim \rho}\left[\sum_{a \in \mathcal{A}} \nabla_\theta \pi(a \mid S, \theta) q_\pi(S, a)\right] & = \mathbb{E}_{S \sim \rho}\left[\sum_{a \in \mathcal{A}} \color{brown}{\beta(a \mid S)} \frac{\color{silver}{\pi(a \mid S, \theta)}}{\color{brown}{\beta(a \mid S)}} \frac{\nabla_\theta \color{silver}{\pi(a \mid S, \theta)}}{\pi(a \mid S, \theta)} q_\pi(S, a)\right] \\ & =\mathbb{E}_{S \sim \rho}\left[\sum_{a \in \mathcal{A}} \beta(a \mid S) \frac{\pi(a \mid S, \theta)}{\beta(a \mid S)} \nabla_\theta \ln \pi(a \mid S, \theta) q_\pi(S, a)\right] \\ & =\mathbb{E}_{S \sim \rho, A \sim \beta}\left[\frac{\pi(A \mid S, \theta)}{\beta(A \mid S)} \nabla_\theta \ln \pi(A \mid S, \theta) q_\pi(S, A)\right] . \end{aligned}\]$$
The proof is complete. The above proof is similar to that of Theorem 9.1.