Sinusoidal Signals
Sources:
- James McClellan, Ronald Schafer & Mark Yoder. (2015). Sinusoids. DSP First (2nd ed., pp. 9-40). Pearson.
Review of Complex Numbers
Representation
A complex number \(z\) may be represented by the notation \(z=(x, y)\), where \(x,y \in \mathbb R\),
- the real part is \(x=\Re\{z\}\), and
- the imaginary part is \(y=\Im \{z\}\).
Note: Electrical engineers use the symbol \(j\) for \(\sqrt{-1}\) instead of \(i\).
We can also represent \(z\) as:
Cartesian or rectangular form \[ z=x+j y \]
Polar form: \[ z = r e^{j \theta}=r(\cos \theta+j \sin \theta) \] This is due to the Euler's formula: \[ \begin{equation} \label{eq_Euler's formula} z = r e^{j \theta}=r(\cos \theta+j \sin \theta) \end{equation} \]
Polar form -> Cartesian form: \[ x=r \cos \theta \quad \text { and } \quad y=r \sin \theta \] Cartesian form -> Polar form: \[ r=\sqrt{x^2+y^2} \quad \text { and } \quad \theta=\arctan \left(\frac{y}{x}\right) \]
Magnitude of the complex number
For a complex number \(z = e^{j \theta}\), its magnitude, denoted as \(|z|\), is: \[ \left|e^{j \theta}\right|=\sqrt{\cos ^2(\theta)+\sin ^2(\theta)}=\sqrt{1}=1 . \] As a result, the magnitude for an arbitary complex number \(z = r e^{j \theta}\) is \(|z| = r\).
Complex conjugate
The complex conjugate of a complex number is the number with an equal real part and an imaginary part equal in magnitude but opposite in sign. The complex conjugate of \(z\) is often denoted as \(\bar{z}\) or \(z^*\).
In cartesian or rectangular form: \[ z^* = x - jy . \]
In polar form: \[ z^* = r e^{- j \theta}=r(\cos \theta - j \sin \theta) \]
Complex Plane
Complex numbers are often represented as points in a complex plane, where the real and imaginary parts are the horizontal and vertical coordinates, respectively, as shown in the figure:
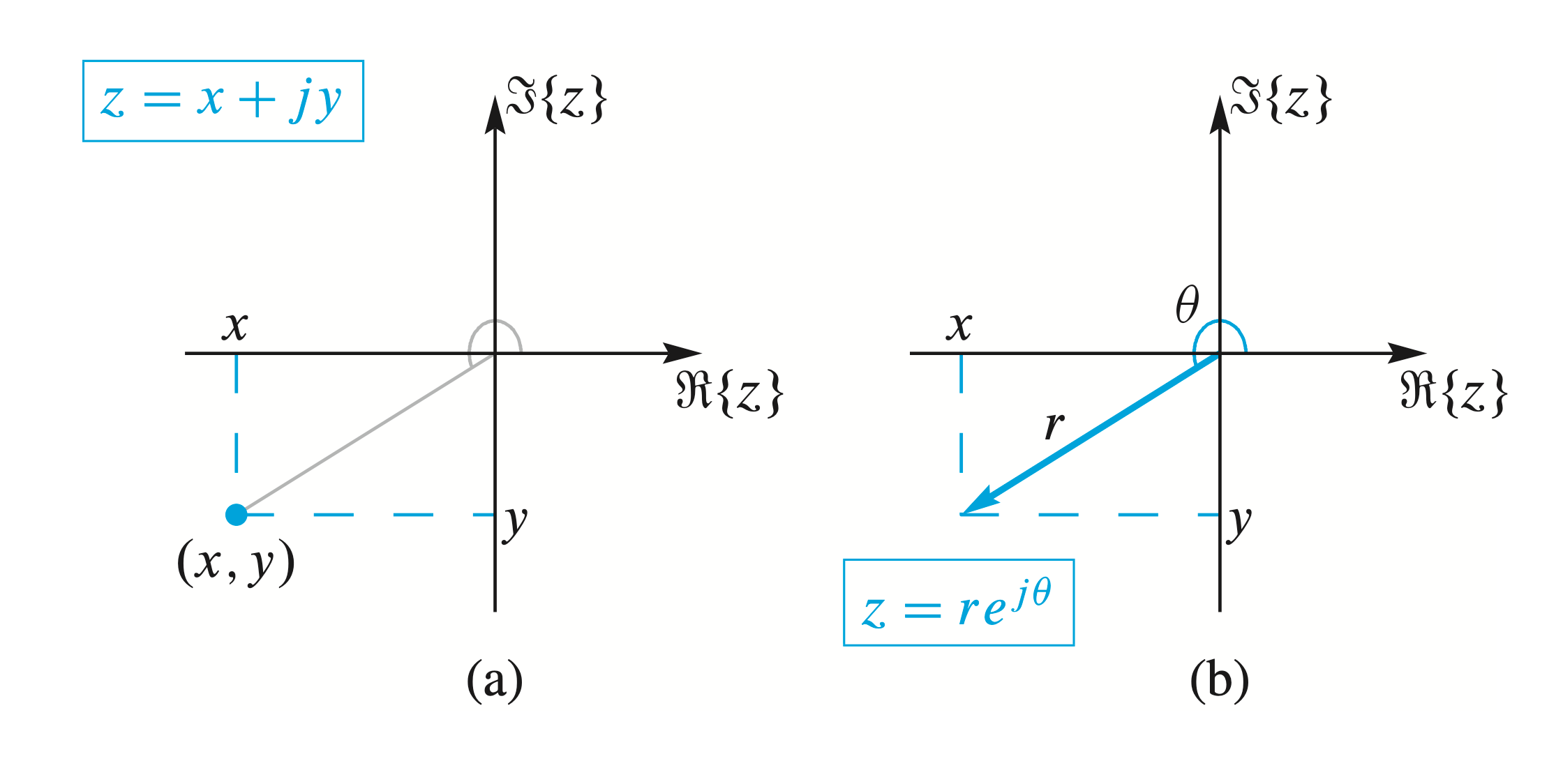
- \(r\): the length of the vector. Also called the magnitude of \(z\) (denoted \(|z|\)),
- \(\theta\): the angle of the vector. Also called the argument of \(z\) (denoted \(\arg z\)).
Inverse Euler Formulas
The inverse Euler formulas allow us to write the cosine function in terms of complex exponentials as \[ \begin{equation} \label{eq2.2.1} \cos \theta=\frac{e^{j \theta}+e^{-j \theta}}{2} \end{equation} \] and also the sine function can be expressed as \[ \begin{equation} \label{eq2.2.2} \sin \theta=\frac{e^{j \theta}-e^{-j \theta}}{2 j} \end{equation} \]
Equation \(\eqref{eq2.2.1}\) can be used to express \(\cos \left(\omega_0 t+\varphi\right)\) in terms of two complex exponentials as follows: \[ \begin{aligned} A \cos \left(\omega_0 t+\varphi\right) & =A\left(\frac{e^{j\left(\omega_0 t+\varphi\right)}+e^{-j\left(\omega_0 t+\varphi\right)}}{2}\right) \\ & =\frac{1}{2} X e^{j \omega_0 t}+\frac{1}{2} X^* e^{-j \omega_0 t} \\ & =\frac{1}{2} z(t)+\frac{1}{2} z^*(t) \\ & =\Re\{z(t)\} \end{aligned} \] where \(*\) denotes complex conjugation.
Sinusoidal signals
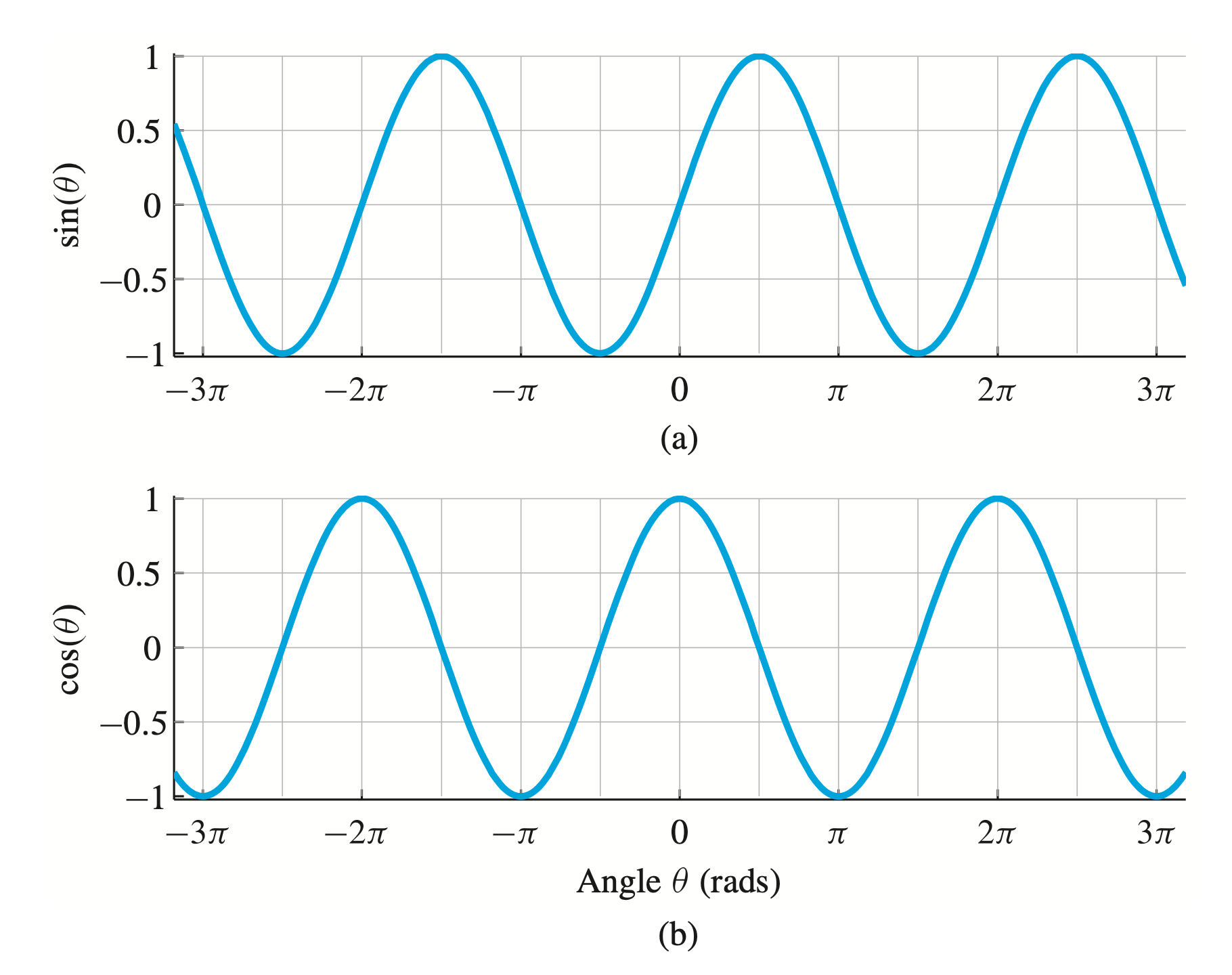 (a) Sine function and (b) cosine function plotted versus angle θ. Both functions have a period of 2π.
(a) Sine function and (b) cosine function plotted versus angle θ. Both functions have a period of 2π.
Many physical systems generate signals that can be modeled (i.e., represented mathematically) as sine/cosine functions versus time:
\[ \begin{equation} \label{1.1} x(t)=A \cos \left(\omega_0 t+\varphi\right) \end{equation} \] (Note that \(\sin\) <==> \(\cos\))
\(A\): Amplitude.
\(\omega_0\): Radian frequency.
\(ω_0\) must have units of rad/s if \(t\) has units of seconds.
Similarly, \(f_0 = \frac{ω_0}{2π}\) is called the cyclic frequency, and \(f_0\) must have units of \(s^{−1}\), or hertz(abbreviated Hz).
\(\varphi\): Phase.
Note: Angles can be specified in degrees (\(^{\circ}\)) or radians (\(\text{rad}\)).
In Signal Processing, this signal is called: cosine/sin signal or cosine/sine wave or sinusoidal signal or sinusoid.
In the latter section, we will see that a sinusoidal signal is the real part of a more general complex exponential signal.
- \(T_0\): the period of the sinusoid. It's the time duration of one cycle of the sinusoid: \[ x(t) = x(t+T_0) . \]
Relation of frequency(\(w_0\) or \(f_0\)) to period \(T_o\): \[ T_0 = \frac {2π}{w_0} = \frac {2π}{2π f_0} = \frac {1}{f_0} . \]
phase and time shift: whenever a signal can be expressed in the form \[ x_1(t)=s\left(t-t_1\right) \] , we say that \(x_1(t)\) is a time-shifted version of \(s(t)\).
- If \(t_1 > 0\), the signal \(s(t)\) has been delayed in time.
- If \(t_1 < 0\), the signal \(s(t)\) has been advanced in time.
Note that: \[ \begin{aligned} x_0\left(t-t_1\right) & =A \cos \left(\omega_0\left(t-t_1\right)\right) \end{aligned} \]
Sampling and Plotting Sinusoids
Sinusoidals are continuous funtions, but computers can only deal with discrete signals.
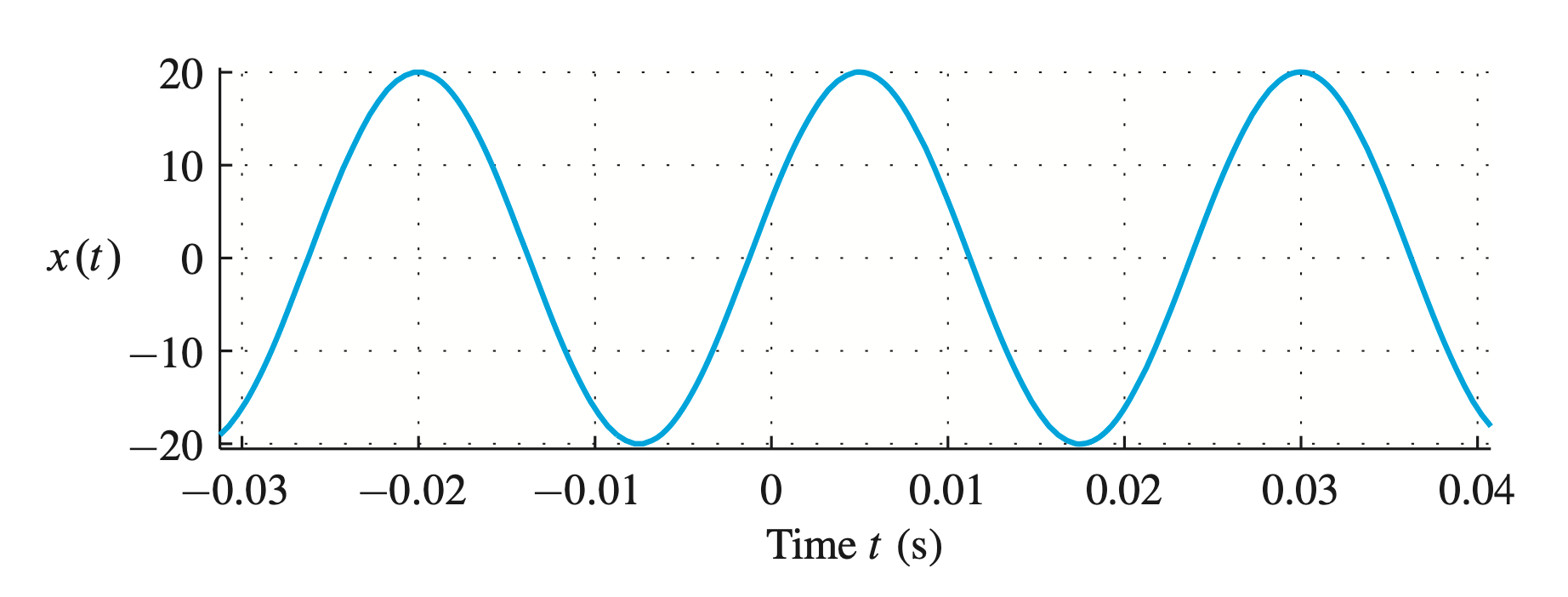
For example, if we wish to plot a function such as \[ x(t)=20 \cos (2 \pi(40) t-0.4 \pi) \] with parameters: \(A = 20\), \(ω_0 = 2π(40)\), \(f_0 = 40\) Hz, and \(φ = −0.4π\) rad.
which is shown in above figure, we must evaluate \(x(t)\) at a discrete set of times. Usually we pick a uniform set \(t_n=n T_s\), where \(n\) is an integer. Then from \(x(t)\) we obtain the sequence of samples \[ x\left(n T_s\right)=20 \cos \left(80 \pi n T_s-0.4 \pi\right) \] where \(T_s\) is called the sample spacing or sampling period.
Complex exponential signals
Using Euler's formula \(\eqref{eq_Euler's formula}\), the complex exponential signal is defined as \[ \begin{align} z(t) & =A e^{j\left(\omega_0 t+\varphi\right)} \label{eq3.1} \\ & = A \cos \left(\omega_0 t+\varphi\right)+j A \sin \left(\omega_0 t+\varphi\right) \end{align} \]
the magnitude is always a positive constant (i.e., \(|z(t)|=A\) )
the angle is \(\arg z(t)=\left(\omega_0 t+\varphi\right)\).
A sinusoidal signal \(\eqref{eq1.1}\) is the real part of a complex exponential signal \(\eqref{eq3.1}\) \[ x(t)=\Re\left\{A e^{j\left(\omega_0 t+\varphi\right)}\right\}=A \cos \left(\omega_0 t+\varphi\right) \]
The usage of complex exponential signal is that it is a alternative representation for the real cosine signal.
The Rotating Phasor Interpretation
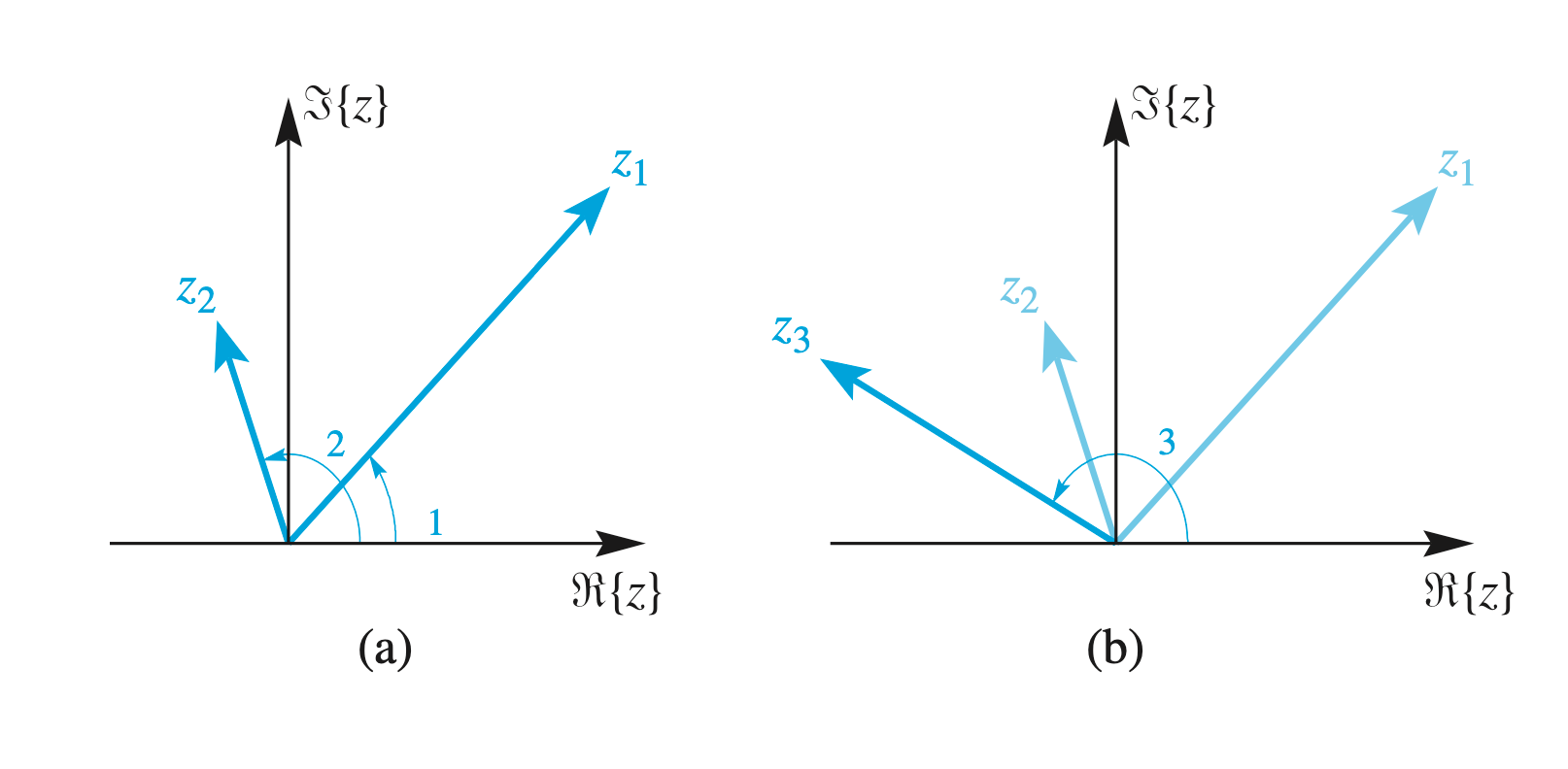
Consider \(z_3=z_1 z_2\), where \(z_1=r_1 e^{j \theta_1}\) and \(z_2=r_2 e^{j \theta_2}\).
Then the multiplication \[ z_3=z_1 z_2 \]
is \[ z_3=r_1 e^{j \theta_1} r_2 e^{j \theta_2}=r_1 r_2 e^{j \theta_1} e^{j \theta_2}=\overbrace{r_1 r_2}^{r_3} e^{j(\overbrace{\theta_1+\theta_2}^{\theta_3}} \] Geometric view: From the above figure, \(z_3\) is a rotated and scaled version of \(z_2\) because \(\angle z_3=\angle z_2+\theta_1\), and the length of \(z_3\) is \(r_1\) times the length of \(z_2\). Here, \(r_1=1.72, r_2=0.77\), and \(r_3=1.32\).
Hense, complex multiplication involves rotation and scaling.
Thus, the complex exponential signal is interpreted as a complex vector that rotates as time increases. If we use \(A\) and \(\varphi\) to define a complex number: \[ X=A e^{j \varphi} \] then the complex exponential \(\eqref{eq3.1}\) can be expressed as \[ z(t)=X e^{j \omega_0 t} = A e^{j \varphi} e^{j \omega_0 t}=A e^{j \theta(t)} \] (i.e., \(z(t)\) is the product of the complex constant \(X\) and the complex-valued time function \(e^{j \omega_0 t}\) ).
where \(\theta(t)\) is a time-varying angle function \[ \theta(t)=\omega_0 t+\varphi \quad(\text { radians }) \]
Phaser Addition
Theorem: a sum of \(N\) cosine signals of differing amplitudes and phases, but with the same frequency, can always be reduced to a single cosine signal of the same frequency. \[ \begin{align} x(t) &= \sum_{k=1}^N A_k \cos \left(\omega_0 t+\varphi_k\right) \label{eq4.1} \\ & = A \cos \left(\omega_0 t+\varphi\right) \nonumber \end{align} \]
A very simple proof can be based on the complex exponential representation of the cosine signals.
Proof
Proof using complex exponential representation:
First, any sinusoid can be written in the form: \[ A \cos \left(\omega_0 t+\varphi\right)=\Re\left\{A e^{j\left(\omega_0 t+\varphi\right)}\right\}=\Re\left\{A e^{j \varphi} e^{j \omega_0 t}\right\} . \] For any set of complex numbers \(\left\{X_k\right\}\), the sum of the real parts is equal to the real part of the sum, so we have \[ \Re\left\{\sum_{k=1}^N X_k\right\}=\sum_{k=1}^N \Re\left\{X_k\right\} . \] Then we pick a \(A e^{j \varphi}\) that satisfies \[ \begin{equation} \label{eq4.3} \sum_{k=1}^N A_k e^{j \varphi_k}= A e^{j \varphi} . \end{equation} \]
Therefore, $$ \[\begin{align} & \sum_{k=1}^N A_k \cos \left(\omega_0 t+\varphi_k\right) \\ = & \sum_{k=1}^N \Re\left\{A_k e^{j\left(\omega_0 t+\varphi_k\right)}\right\} \label{eq4.4.1} \\ = & \Re\left\{\sum_{k=1}^N A_k e^{j \varphi_k} e^{j \omega_0 t}\right\} \nonumber \\ = & \Re\left\{\left(\sum_{k=1}^N A_k e^{j \varphi_k}\right) e^{j \omega_0 t}\right\} \label{eq4.4.3} \\ = & \Re\left\{\left(A e^{j \varphi}\right) e^{j \omega_0 t}\right\}=\Re\left\{A e^{j\left(\omega_0 t+\varphi\right)}\right\} \label{eq4.4.4} \\ = & A \cos \left(\omega_0 t+\varphi\right) . \nonumber \end{align}\] $$
- The equality of \(\eqref{eq4.4.1}\) is due to Euler's formula \(\eqref{eq_Euler's formula}\).
- The transition from \(\eqref{eq4.4.3}\) to \(\eqref{eq4.4.4}\) is due to \(\eqref{eq4.3}\).