Computer Storage
Outline:
- Basic Ideas:
- Cache
- Main Memory
- VRAM
- Disk
- Storage Material
- RAM
- ROM
Intro
存储器由一定数量的单元构成,每个单元可以被唯一标识,每个单元都有存储一个数值的能力。
- 地址:单元的唯一标识符(采用二进制)
- 地址空间:可唯一标识的单元总数
- 寻址能力:存储在每个单元中的信息的位数•大多数存储器是字节寻址的,而执行科学计算的计算机通常是64位寻址的


Figure 2.1 The levels in a typical memory hierarchy in a personal mobile device (PMD), such as a cell phone or tablet (A), in a laptop or desktop computer (B), and in a server (C). As we move farther away from the processor, the memory in the level below becomes slower and larger. Note that the time units change by a factor of 109 from pico- seconds to milliseconds in the case of magnetic disks and that the size units change by a factor of 1010 from thou- sands of bytes to tens of terabytes. If we were to add warehouse-sized computers, as opposed to just servers, the capacity scale would increase by three to six orders of magnitude. Solid-state drives (SSDs) composed of Flash are used exclusively in PMDs, and heavily in both laptops and desktops. In many desktops, the primary storage system is SSD, and expansion disks are primarily hard disk drives (HDDs). Likewise, many servers mix SSDs and HDDs.
The Memory Hierarchy
计算机的存储架构是分层的:
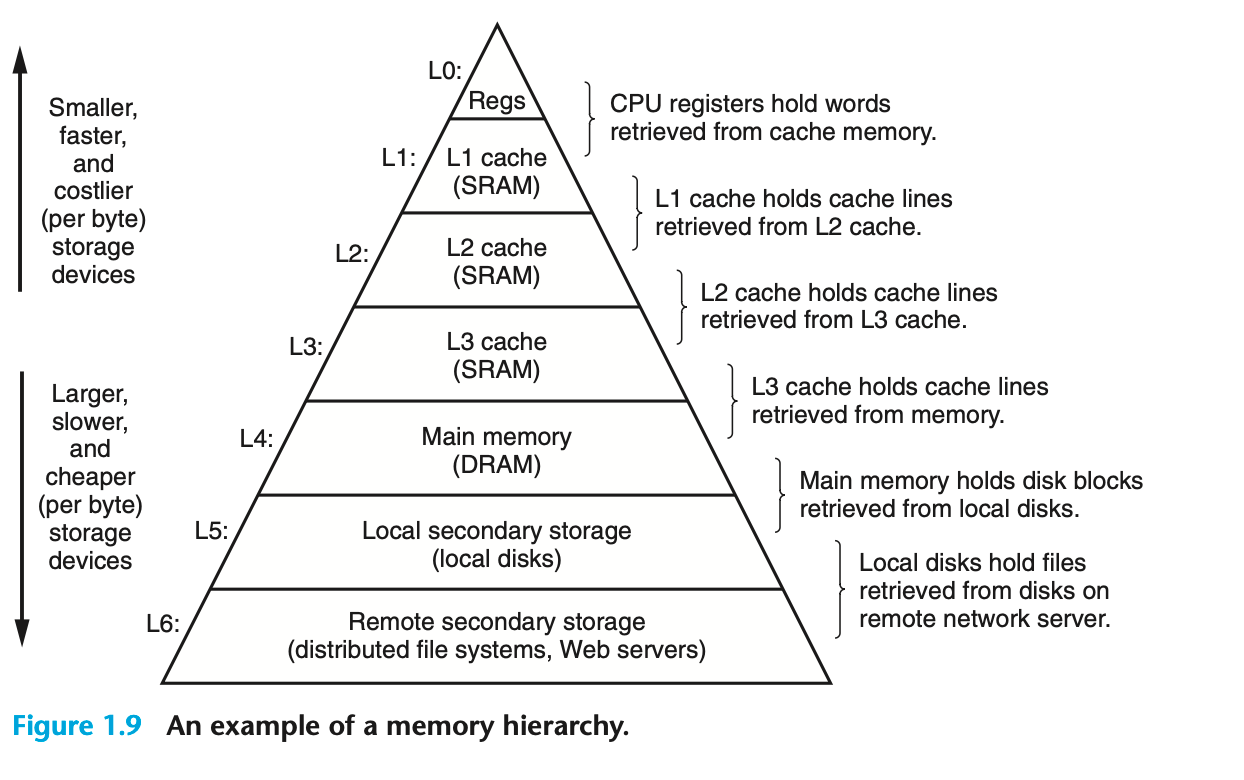
- CPU registers: 也就是CPU的 register file, 对它的访问没有延迟
- cache memory: 有L1,L2, L3 ...,差别是timing 。访问L1没有延迟,访问L2有1-2个时钟周期的延迟
- main memory: 主存, the work house of memory system, 也被称为RAM.(当然更精确的说法是DRAM)
- disk: 硬盘,是一种外部存储设备,最慢
越上层速度越快,价格越贵,其容量也就越小.
Why we need memory hierarchy?
Different memory technologies have different performance characteristics (and other characteristics)
Memory hierarchy takes advantage of locality and trade-offs in the cost-performance of memory technologies.
还有虚拟内存 , 这是进程视角下的内存, 包含了主存和一部分从硬盘中置换出来的存储空间. 通过硬件MMU( Memory Management Unit )实现虚拟内存地址和物理内存地址的转换.
总之,虚拟内存是一个抽象的内存概念, 和现实的存储结构没有关系.
Cache
- Cache, 位于CPU内部的存储设备,其材质一般是SRAM. 一般有多级cache, 如L1/L2/L3
Main Memory
main memory(OR system memory ):主存,也称为system memory. 在冯诺依曼架构中, 处理器( 包括ALU和Controller )与存储器进行数据交互, 这里我们把和CPU交互的RAM称为主存.
后面会提到, 主板上的内存条( memory module, 由DRAM组成 )的集合就是主存,提供给CPU一个统一的内存视图
在通常的语境下,我们说的RAM都是主存,也就是和CPU交互的DRAM
板载内存( on-board memory ):焊接在电路板上的内存就是板载内存,它无法更换。 与之对应的是可插拔的内存条。
- 对于系统RAM,除了板载内存,还可以用可插拔的内存条。
- 不过对于显存( VRAM ),目前已经不存在可插拔的显存了,所以所有显存都是板载的( 起码目前为止 )
- 系统RAM的板载内存一般焊接在主板上,而显存一般焊接在显卡的PCB( 印刷电路板,也就是显卡的“主板”)上
VRAM
显存的文档
- Video RAM (VRAM): 显存, 用作GPU的frame buffer. 广义地讲, 显存不是一种特定的RAM材质, 任何用作主存的RAM( 也就是DRAM )都可以用作显存。 事实上我们可以把和CPU交互的DRAM叫主存,和GPU交互的叫显存。
- 当然了,在带宽、延迟和速度方面,CPU和GPU的需求是不同的。因此VRAM的材质一般采用GDDR( 下文会介绍 )
- VRAM主要存储纹理数据( texture data ),用于和GPU交互。 因此它也被称为 Texture Memory
- 当显存不够用时,GPU将会不得不从主存中分配内存来作为VRAM。 甚至如果电脑采用集显,也就是和CPU集成到一起的GPU, GPU就没有自己的RAM。 GPU会将系统RAM的一部分作为VRAM,显而易见这很慢
- 也有一些计算机使用“统一内存”, 即CPU和GPU都使用为GPU设计的RAM,在运行时为两个处理器动态分配。这样就避免了给GPU和CPU使用不同的内存。
- 比如PlayStation 5和M1,统一使用GDDR
- 作为一个额外的好处,如果CPU和GPU都需要相同的数据,就不需要在两套不同的内存中拥有两个副本。
- 有些厂商会提供同一型号但是不同VRAM容量的显卡,其实一般来说,为了单单高一点VRAM就加钱没啥必要。。。
- 显存的指标:显存主要包括capacity、frequency和bandwidth这三个参数
Disk
Disk:称为硬盘,是非易失的外部存储设备。因为早期的硬盘都是机械硬盘( HDD ),成盘状,所以称为硬“盘”
机械硬盘( HDD ):拥有磁头,扇区和盘片, 材料和ROM没关系.
- HDD比较重,而且运行时会呼呼地转,发出噪音. HDD价格低容量大,速度也远远慢于SSD. 适合存储一些音频、视频数据
- 现在M.2 NVMe固态硬盘速度能达到3500MB/s,就算是普通的SATA SSD速度也能到550MB/s,而机械硬盘现在能到200MB/s就很不错了
固态硬盘( SSD, Solid State Disk ):
SSD没有物理上的磁头和盘片,也没有扇区和磁道等概念. SSD的存储原理和机械硬盘不同,它是闪存盘的matrix,用某种控制芯片将多个NAND FLASH颗粒整合,
- Flash属于广义上的ROM( 见下文ROM ).
严格地讲,SSD不算Disk, 不过它在计算机架构中确实承担着Disk的职能( 外部存储设备 ),所以把SSD放入Disk一类
SSD价格贵, 速度快. 因为没有磁头, 寻道时间几乎为0. 因为没有机械部件, 因此抗震荡, 低功耗, 无噪音
现在流行的使用MVMe协议的SSD
机械硬盘只能实现 50-120 MB/秒的写入速度,而固态硬盘能达到 550 MB/秒的 SATA 总线极限值
注意,虽然SSD材料是ROM,但磁盘和ROM是两个概念。 现代的磁盘包括了HDD和SSD, 已经不是一个材料概念,而是一个计算机架构中的抽象的功能的概念。 而ROM是一个材料的概念。不能把ROM和Disk混为一谈。
Locality
Storage Technologies
RAM
RAM( random access memory ): 是volatile(易失性)的存储材料, 也就是说断电就会丢失所有信息。 RAM常用来做计算机的内存,包括cache和主存等
RAM分为两类:
- SRAM( Static RAM ): “静态”是指只要不掉电, 存储在SRAM中的数据就不会丢失
- 更快更贵,一般用作Cache( 包括TLB )
- DRAM( Dynamic RAM ): 在通电时还需要进行周期性的刷新操作, 才能保证数据不丢失
- 比SRAM慢,也更便宜,一般用作主存和显存
下图总结了SRAM和DRAM的区别:

- SRAM的存取比DRAM快
- SRAM对干扰不敏感
- SRAM每单元使用更多晶体管,密集度低,比DRAM更贵,功耗更大
我们规定RAM芯片的基本存储单位是bit,对应的物理结构称为cell
SRAM
SRAM 将每个bit存储在一个 bistable ( 双稳态 )的cell里。每个cell用一个 six-transistor电路实现。
双稳态:
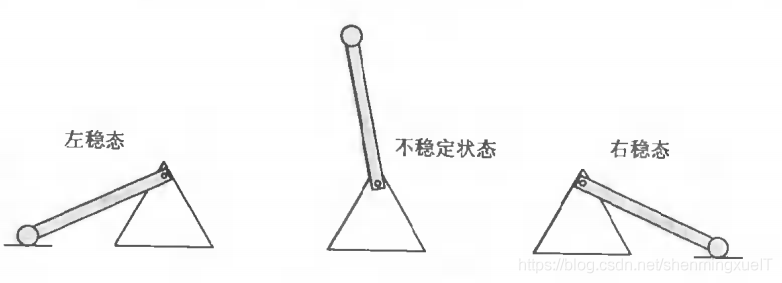
上图是一个双稳态电路,它永远保持在两个不同的电压状态,也就是在上图左(右)稳态。其他任何状态都是不稳定的——电路会从不稳定状态迅速地转移到其中一个稳定状态。
上图其实有个地方应该是有偏差的,也就是中间那个状态。原则上来说,当左右两边的作用力相同时,钟摆在垂直的时候也能无限期地保持平衡,但是当左右两边稍微发生一点扰动,这个状态就会变成左稳态或右稳态之一。而且一旦倒下,便不会有机会再站起来。我们称这个状态为亚稳态。
因为SRAM有双稳态的特性,只要有电,它就会永远的保持它的值, 即使有干扰来扰乱电压, 当干扰时, 电路就会恢复到稳定值.
- 也就是说SRAM在通电时不需要刷新就能保存数据
但是, 如果没有电, 双稳态就不能保持, 意味着数据也就丢失了. 这就是“电脑断电后内存数据就会丢失”的原因.
DRAM
DRAM将每个位存储为对一个电容的充电。DRAM可以制造得非常密集——每个单元由一个电容和一个访问晶体管组成。但是与SRAM不同的是,DRAM存储器的单元对干扰非常敏感.当电容的电压被扰乱之后,它就永远不会恢复了.
- DRAM加电时需要不断刷新, 才能保存数据
DRAM Structure
- DRAM芯片的每\(w\)个cell组成一个supercell,每\(d\)个supercell组成一个DRAM芯片的存储部分。
- 即, 一个\(d \times w\)的DRAM总共存储了$d w $ bit
- supercell被组织成一个\(r\)行\(c\)列的长方形阵列,其中\(r \times c = d\). 每个DRAM内使用\((i,j)\)二维地址( 即\((行号, 列号)\) )对supercell进行寻址
- 也就是说,DRAM的寻址的基本单位是supercell, DRAM没有提供机制给supercell内部的cell寻址
example:
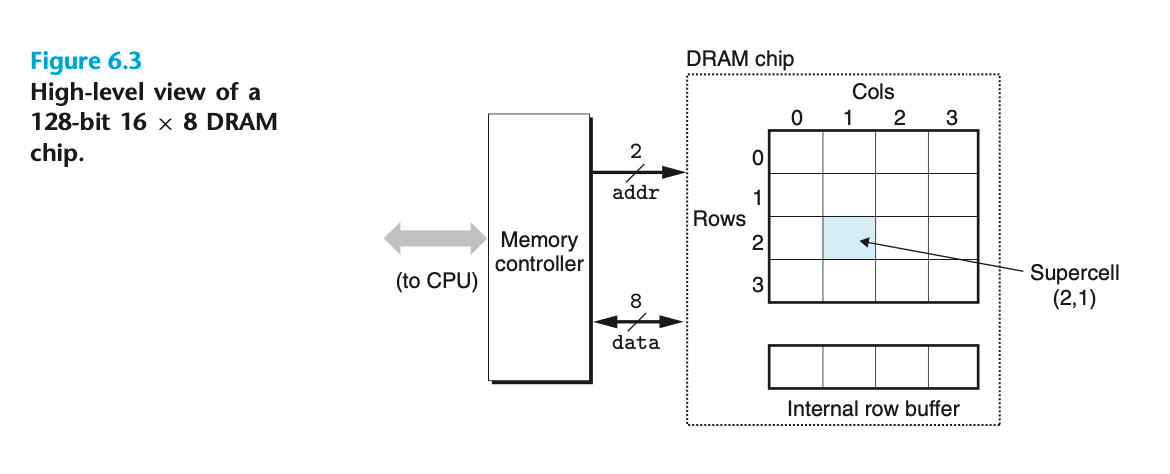
- 上图展示了一个$16 * 8 \(的DRAM芯片,其中含有\)d = 16\(个supercell,每个supercell包含\)w = 8 \(个cell,\)r=4$行, \(c=4\)列
- 每个supercell含有8个cell,相当于每个supercell存储了1 Byte, 即该DRAM是按字节寻址的
pin
- pin( 引脚 ): 对芯片的外部物理接口的抽象称呼,这里我们只讨论用于信息I/O的pin, 每个携带1 bit信号。 其实不是所有的pin都能用来信息I/O, 比如Vcc和GND,除了供电,就没有其他用处。
DRAM芯片通过pin来进行信息传输,上图给出了两组pin:
- 8个data pin,能在芯片中I/O一个字节
- 2个addr pin,能携带一个2 bit的地址,用于对supercell的寻址
- 注意到,这个DRAM是4行4列的,所以一次只能对一维进行寻址
DRAM Addressing
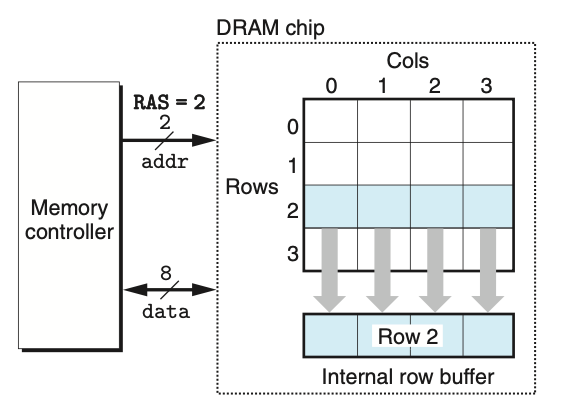
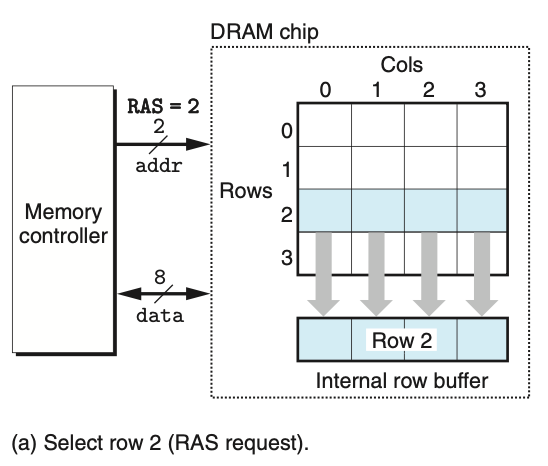
每个DRAM芯片被连接到某个称为memory controller的电路。这个电路可一次向每个DRAM芯片I/O \(w\)位。memory controller读取supercell \((i,j)\)的内容的步骤为:
memory controller会通过addr pin发送2 bit的行地址\(i\)
这个操作称为a RAS (row access strobe) request
DRAM此时会选中supercell mateix的第\(i\)行,复制到内部行缓冲区:
![DRAM addressing 1]()
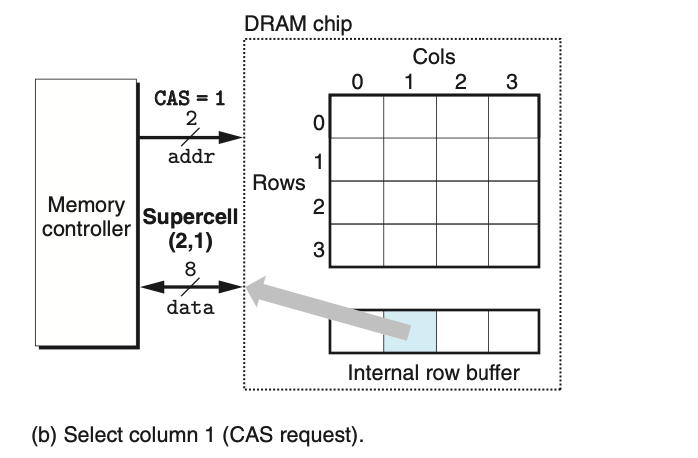
再发送2 bit的列地址\(j\)
这个操作称为a CAS (col access strobe) request
DRAM此时会选中行缓冲区的第\(j\)列. 该元素就是supercell\((i,j)\)的1 Byte内容
![DRAM addressing 2]()
DRAM然后会将这1 Byte内容通过8个data pin发送给memory controller
这个模型把DRAM的supercell组织成二维而不是一维数组,是为了降低芯片上addr pin的数量。 如果supercell被组织成一维数组,就需要\(\log_216 = 4\)个addr pin. 但是二维数组就需要如上所述的两次寻址,要花更多的时间
这里考虑最简情况,把一个DRAM芯片当做一个memory module。稍后我们会看到,一个memory module由多个DRAM组成,由 memory module和memory controller交互
Memory Module
- memory module: DRAM被组织成memory module,插到主板的插槽上
- memory module也就是我们常说的内存条
- main memory:主存,也称为system memory. 主板上内存条的集合,提供给计算机一个统一的内存视图,这就是主存
- 此外还存在“显存”, 其实二者是一样的。 给CPU用的叫主存,给GPU用的叫显存
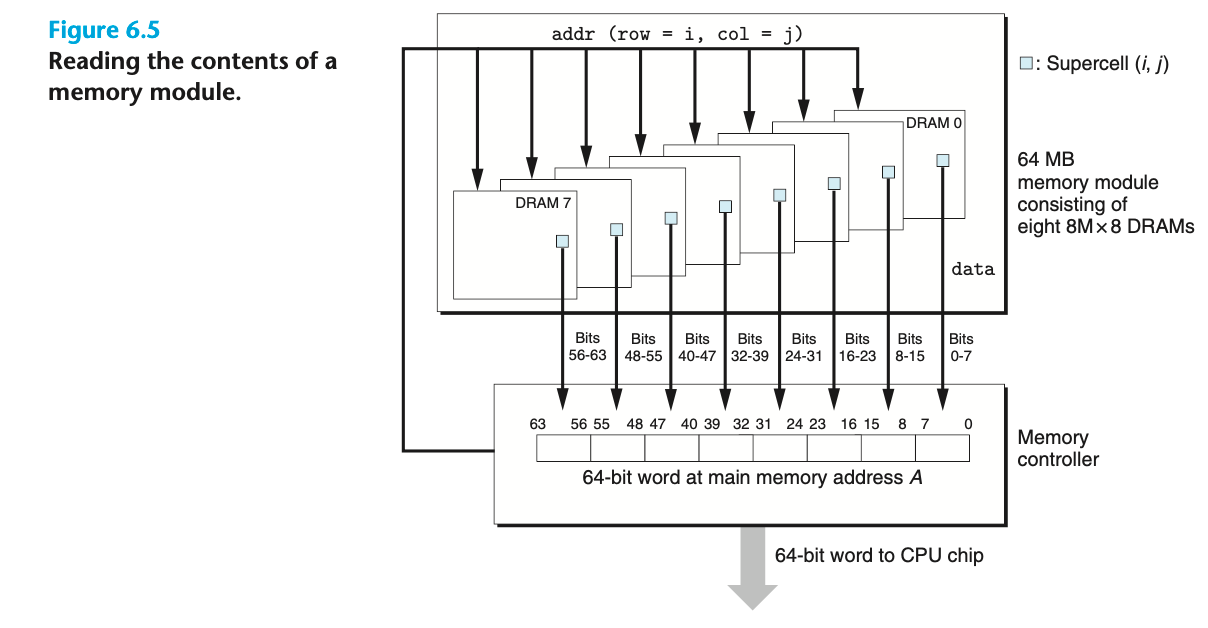
上图展示了一个容量为64 MB 的memory module, 由8个 8MB * 8 ( \(d = 8* 1024 * 8, w = 8\) )的DRAM芯片组成,按0~7编号。每个supercell存储\(w = 8\) bit 信息。
我们假设一个word为8 Byte. 地址A \((i,j)\)上的一个word 就由这8个DRAM的地址为\((i,j)\)的supercell组成。 也就是说DRAM0的\((i,j)\)存储A的第0个Byte, DRAM1的\((i,j)\)存储A的第1个Byte, 以此类推 8个DRAM中读取的8个Byte被发送给memory controller, 组合成一个word,再发送给CPU
Enhanced DRAMs
除了上述我们介绍的常规DRAM,还有很多变种的DRAM
FPM DRAM
- Fast page mode DRAM (FPM DRAM): 传统的DRAM在读取\((i,j)\) 数据时,会先将第\(i\)行copy到行缓冲区,然后读取第\(j\)列将其返回, 丢弃该行的其他元素。 如果workload是要读取第i 行的所有supercell,那么传统DRAM会在每个RAS/CAS后丢弃剩余数据,重新加载行缓冲区。这无疑是十分低效的。 FPM DRAM在完成\((i,j)\)的RAS/CAS后, 不会丢弃剩余的元素。 因此对于第\(i\)行其他元素的RAS/CAS,可以直接返回结果
EDO DRAM
- Extended data out DRAM (EDO DRAM): 比FPM DRAM更先进, 可以把多个CAS缓冲CAS为一组,一起发送
SDRAM
采用外部时钟与处理器同步,具有更高的数据传输速率
- Synchronous DRAM (SDRAM): 传统DRAM, FPM DRAM, EDO DRAM都是以异步方式进行I/O的( 使用RAS和CAS两个独立的信号 ). 而SDRAM的I/O都在系统时钟的上升沿执行,这使得它可以同步地存取数据. 简言之,SDRAM比传统DRAM快很多
- SDRAM属于RAM, 因此也需要周期性刷新
- SDRAM的材质分为双极性与CMOS( Complementary Metal Oxide Semiconductor, 互补金属氧化物半导体 )
- CMOS还被用于在数字影像领域. 市面上常见的数码产品, 其感光元件主要就是CCD或者CMOS, 尤其是低端摄像头产品, 而通常高端摄像头都是CCD感光元件.
- 主板上就用了一个CMOS芯片来记录时间和硬件配置参数,比如该从哪个盘启动. 该硬件很悲催,没有自己的名字,我们就称为CMOS. CMOS里自带一个小电池, 因此虽然是易失性的,断了电也能工作
DDR SDRAM
Double Data-Rate Synchronous DRAM (DDR SDRAM):双通道DDR SDRAM, 是SDRAM的增强版, 在上升/下降沿都执行I/O
DDR 是一种特殊的 SDRAM,也采用外部时钟与处理器同步,但是与 SDRAM 相比,DDR 允许在一 个时钟周期内读/写两次数据,可以加快数据传输速率
随着 prefetch buffer ( 预取缓冲区,决定了有效带宽 ) 的增大,DDR已经分为DDR (2 bits), DDR2 (4 bits), DDR3 (8 bits), DDR4( ) and DDR5( 16 bits )
- 注意, DDR4的prefetch和3一样,都是8 bit,但是DDR4提高了核心频率,所以总线速度得以提高
- DDR的"Double Data-Rate"指的是会在系统时钟的上升和下降沿都执行I/O,并不意味着DDR的速度是SDRAM的两倍。 事实上,随着DDR技术的进步,速度差距是越来越大的。
| SDRAM | DDR | DDR2 | DDR3 | DDR4 | |
|---|---|---|---|---|---|
| prefetch buffer size | 1 bit | 2 bit | 4 bit | 8 bit | 8 bit |
| 电压 | 3.3 | 2.5 - 2.6 | 1.8 | 1.35 - 1.5 | 1.2 |
GDDR
- GDDR( Graphics Double Data Rate DRAM ): 一般用作VRAM( 显存 ),带宽更高,速度更快, 支持并发读写(当然容量也更小)。 市面上常见的有GDDR6
- GDDR和主存的普通DDR的最大区别就是前者有一个宽的“总线”, 总线越宽,数据传输速率越高。 由于图形涉及并行操作大量数据,因此内存总线的宽度非常重要。
ROM
ROM( Read-Only Memory ): 顾名思义是不可写的一种存储材质,它是novolatile( 非易失性)的, 数据不会随着断电而丢失。
- 不过,“不可写”其实是生产工艺的限制,而不是什么设计上的特性。
- 后来ROM发展出了可擦写的存储材质EPROM和EEPROM,因为是可擦写的,所以严格来讲不算"Read-Only", 但是它们确实是在ROM技术上发展出来的,因此也称为ROM。 后来在这两种技术的发展上又发展出了NAND FLASH闪存,这就是我们现在用的U盘中用到的技术,同样,因为其体积小,容量和速度均不错,现在手机存储中的emmc颗粒也是用的这种技术,所以有手机厂商就把手机的存储容量约定俗成为ROM,其继承ROM断电不丢失数据的特性,而且有着较快的速度。(但是是可擦写的哦)
- EEPROM和flash都有写入次数限制
- 因此, 闪存(Flash)依然是 ROM 的一种, 写入Flash时必须先擦除原有数据,因此写速度比读速度要慢不少.
refs: CSAPP
Others
PROM, 可编程只读存储器,非易失,可以一次电写入,但之后无法修改
EPROM 可擦除可编程只读存储器,可以写入多次,但需要通过紫外光擦除整个芯片的信息,时间长,但是造价相对较低集成度高
EEPROM: 电子 EPROM,可以擦除单个字节,消耗时间相对较短,但是造价贵且集成度低
CD-ROM: 采用串行存储, 并非随机访问
内存的刷新策略
- 集中式刷新:
- 方式:停止读写操作,刷新每一行
- 缺点:刷新时无法操作内存
- 分散式刷新:
- 方式:每个存储周期内,读写操作完成时进行刷新
- 对集中式的改进:用户不会感受到内存停止
- 缺点:会增加每个存储周期的时间
- 异步刷新:
- 方式:每行各自以64ms间隔刷新;两个时间间隔内保证每一行被刷新一次
- 优点:刷新不需要占用读写时间,效率高,常用
内存的模块组织策略
- 位扩展:地址线不变,数据线增加
- 使用8个41b芯片组成48b存储器(注意此时每个地址都会同时选中八个芯片上的对应位置)
- 字扩展:数据线不变,地址线增加
- 使用8个48b芯片组成328b存储器(高3位用于选片)
- 字、位扩展:数据线和地址线同时增加
- 使用8个44b芯片组成168b存储器(高2位选片;每次同时选中两片)
Questions
COA2022 05
Q:
已知某机主存容量为 64KB,按字节编址。假定用 1K×4 位的 DRAM 芯片构成该存储器,
请问: a) 需要多少个这样的 DRAM 芯片?
- 主存地址共多少位?哪几位用于选片?哪几位用于片内选址?
Answer:
a):
1B=8bit
所以 N=64KB/(1K4it)=168=128 个
b):
按字节选址的话 64K=2^6*210=216B, 所以主存地址一共 16 位.
由于片内为 1K 个地址,所以低 10 位为片内地址,高 16-10=6 位用于选片。
注意,此处不能算为 128=27,所以高 7 位选片,低 16-7=9 位用于片内选址。因为片内的选址单元是 4 位,需要位扩展后才能按字节编址(整体上是字位扩展),即选片时都是同 时选中 2 个芯片
Q: 假定用 8K×8 位的 EPROM 芯片组成 32K×16 位的只读存储器,请问
数据寄存器(用于存放数据)最少应有多少位?
地址寄存器(用于存放地址)最少应有多少位?
共需要多少个 EPROM 芯片
Answer:
- 6 位,与每个寻址单元中数据的长度相同
- 32K=2^15bit 所以最少15位
- 32/8*16/8=8 个
1B=8bit
所以 N=64KB/(1K4it)=168=128 个

?? 为什么用后面的数字作为位元阵列的数量?
Q:下列各类存储器中,不采用随机存取方式的是( )。
A. EPROM
B. CD-ROM
C. DRAM
D. SRAM
Answer: B
随机存取是指 CPU 可对存储器的任一存储单元中的内容随机存取,而且存取时间与存储单元的物理位置无关。
A、C 和 D 均采用随机存取方式,CD-ROM 即光盘,采用串行存取方式。注意,CD-ROM 是只读型光盘存储器,其访问方式是顺序访问,不属于只读存储器 ROM。
Q:
某容量为256MB的存储器由若干4M×8位的DRAM芯片构成,该DRAM 芯片的地址引脚和数据引脚总数是( )。
A. 19 B. 22 C. 30 D. 36
4M×8 位的芯片数据线应为 8 根,地址线应为 log24M = 22 根,而 DRAM 采用地址复用 技术,地址线是原来的 1/2,且地址信号分行、列两次传送。地址线数为 22/2=11 根,所以地址引脚与数据引脚的总数为 11 +8= 19 根,选 A。此题需要注意 DRAM 采用的是传两次 地址的策略,所以地址线为正常的一半,这是很多考生容易忽略的地方。
- 回顾一下, 内存采用DRAM, 因此地址线复用. 地址线复用可以在线不变的情况下增大地址空间, 缺点是每次访问都需要两次传输, 降低速度. 内存需要更大的地址空间, 因此用DRAM;
- 而Cache采用SRAM, 地址线不会复用. 这可以增大访问速度, 缺点是需要的地址线较多. 对于Cache最关键的是速度, 因此Cache使用SRAM( 或者说不复用地址线 )

看不懂. 总之前面的数字代表的是地址线


先把word拼起来, 每行都是1word

看不懂, 总之是低位表示芯片编号, 因此查到芯片编号. 接着由于一个周期只能访问一个芯片, 所以第三个周期到了第二个芯片, 但我没搞懂, 读取数据(8B)不需要时间吗?

看不懂, 只需知道4次访问都不能在同一模块内